Research Volunteer at LIDAR (Laboratory for Intelligent Decision and Autonomous Robots)
Volunteer | | Links:
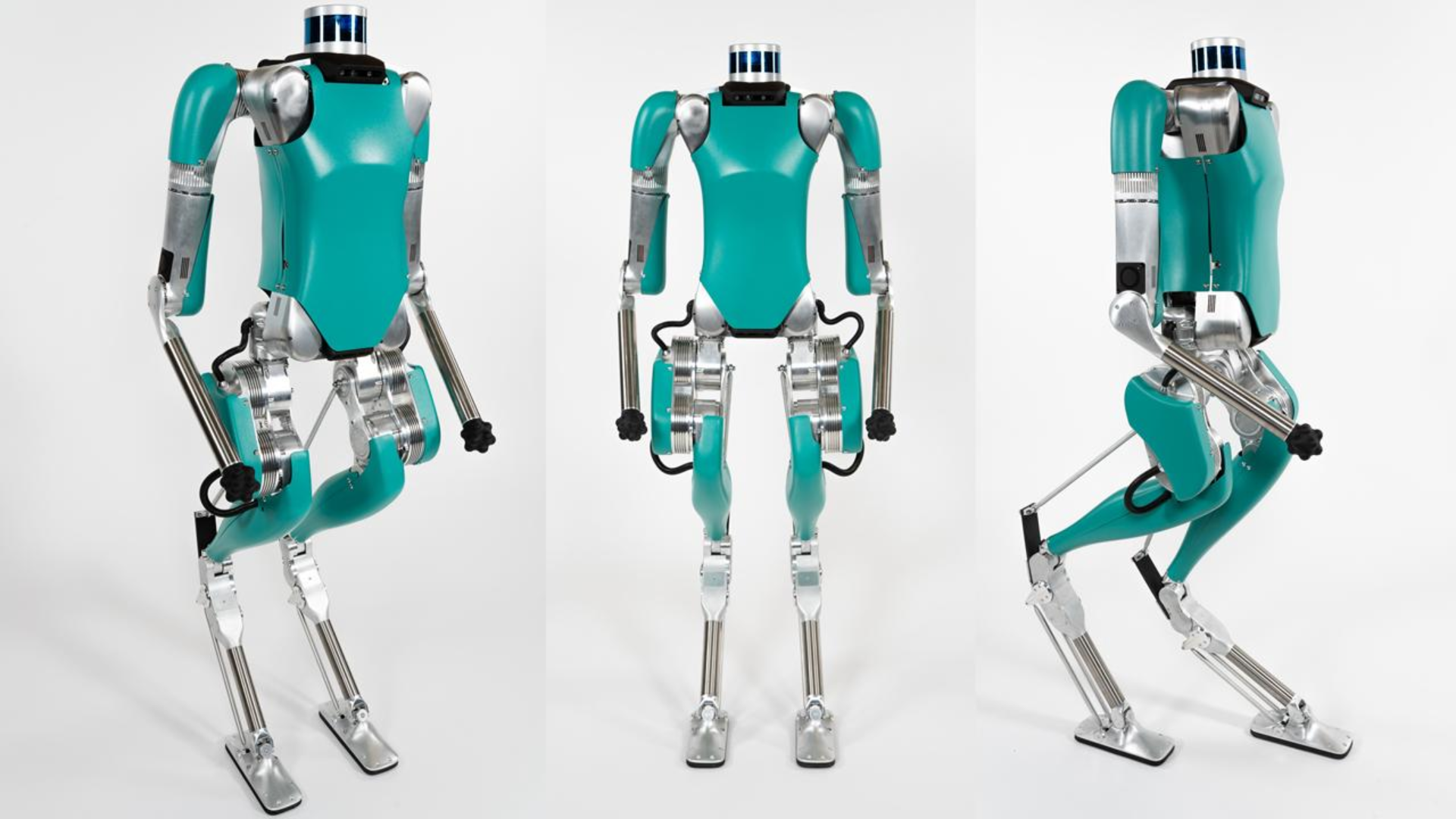
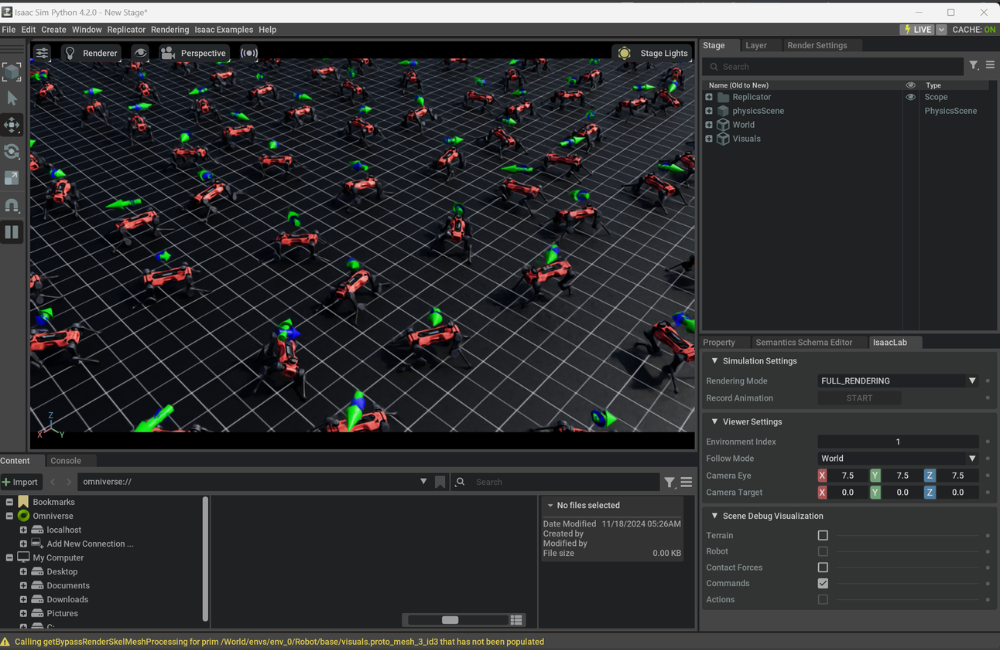
We are assisting in research on training and deploying Reinforcement Learning agents on the Digit humanoid robot. The training algorithm is to be deployed in the IsaacLab training environment. My sub-group is working to bring TorchRL functionality into IsaacLab.
Collaboration
My team members and I have leveraged currently ongoing efforts provided by a researcher working with the IsaacLab team. We then tested the integration using the training script provided to verify the successful implementation of TorchRL within IsaacLab.
Integration
Next Steps
Moving forward, we plan to extend this integration to support training for the Digit humanoid robot, building on the current research that’s been done in the IsaacLab training environment.